El proyecto SILUX consiste en la automatización de la tarea de recogida de piezas contenidas dentro de una caja y su posterior traslado al siguiente punto de la cadena de producción. Este tipo de sistemas, conocidos como bin picking, combinan la acción de un brazo robótico con la información capturada por cámaras que proporcionan información 2D y/o 3D de la escena. Utilizando esta información se dota al robot de la inteligencia necesaria para que sea capaz de recoger una a una todas la piezas de la caja.
- SILUX ofrece una solución a este complejo problema mediante dos fases, en la primera realiza la detección y segmentación 2D del objeto mediante la tecnología Deep Learning y lleva a cabo la toma de decisión de la pieza más conveniente a coger. Posteriormente, en una segunda fase, realiza el matching 3D para proporcionar al robot las coordenadas de la posición y de la pose de dicha pieza. Una ventaja destacable que ofrece este sistema es que está diseñado para poder detectar cualquier pieza que se desee, a través de una herramienta que automatiza todo el proceso de generación de los modelos de detección 2D y 3D de forma totalmente transparente para el usuario final.
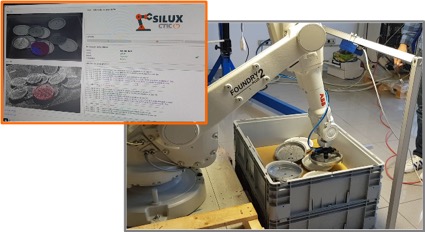
Ilustración 1. Detalle del sistema SILUX en funcionamiento. A la derecha, vista de la interfaz; a la izquierda, brazo robótico cogiendo la pieza detectada por el sistema.